Impact
The impact of one stock on another is a measure of how changes in a source stock cause changes in the motion of the target stock.
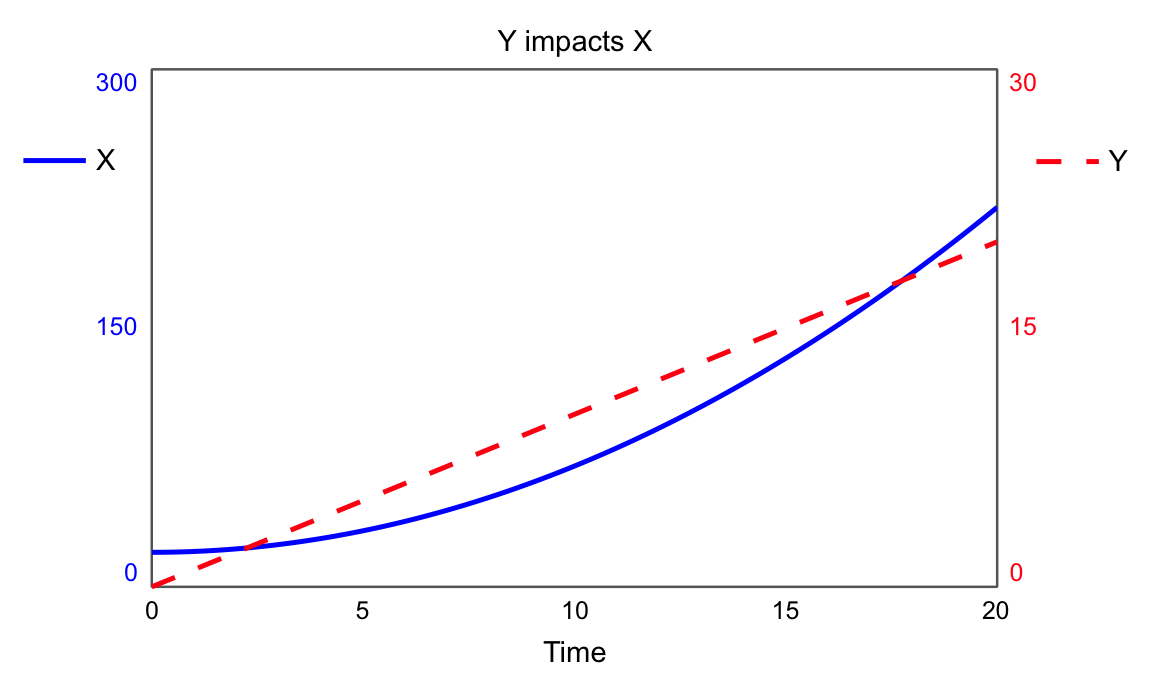
Let Y be a source stock influencing a target X. A change in Y will cause X to accelerate or decelerate, figure 1. This is the impact of Y on X.

The impact of Y on X is measured by the acceleration imparted to X by Y, divided by the rate of change of X. Thus impact is a ratio that measures the curvature in the graph of X over time, figure 2. Constant impact would give an exponential curve.
Loop Impact – First-Order Loops
Loop impact is the impact of the feedback loop on the behaviour of each stock in the loop. Specifically, this is the impact on the stock by the previous stock in the loop. Look at figure 3. The stock N directly influences itself through two loops, R and B. Each loop has an impact, in this case, b and -d. The minus sign represents a balancing loop. In each case, N is both the source stock and its own target stock.

Loop Impact – Higher-Order Loops
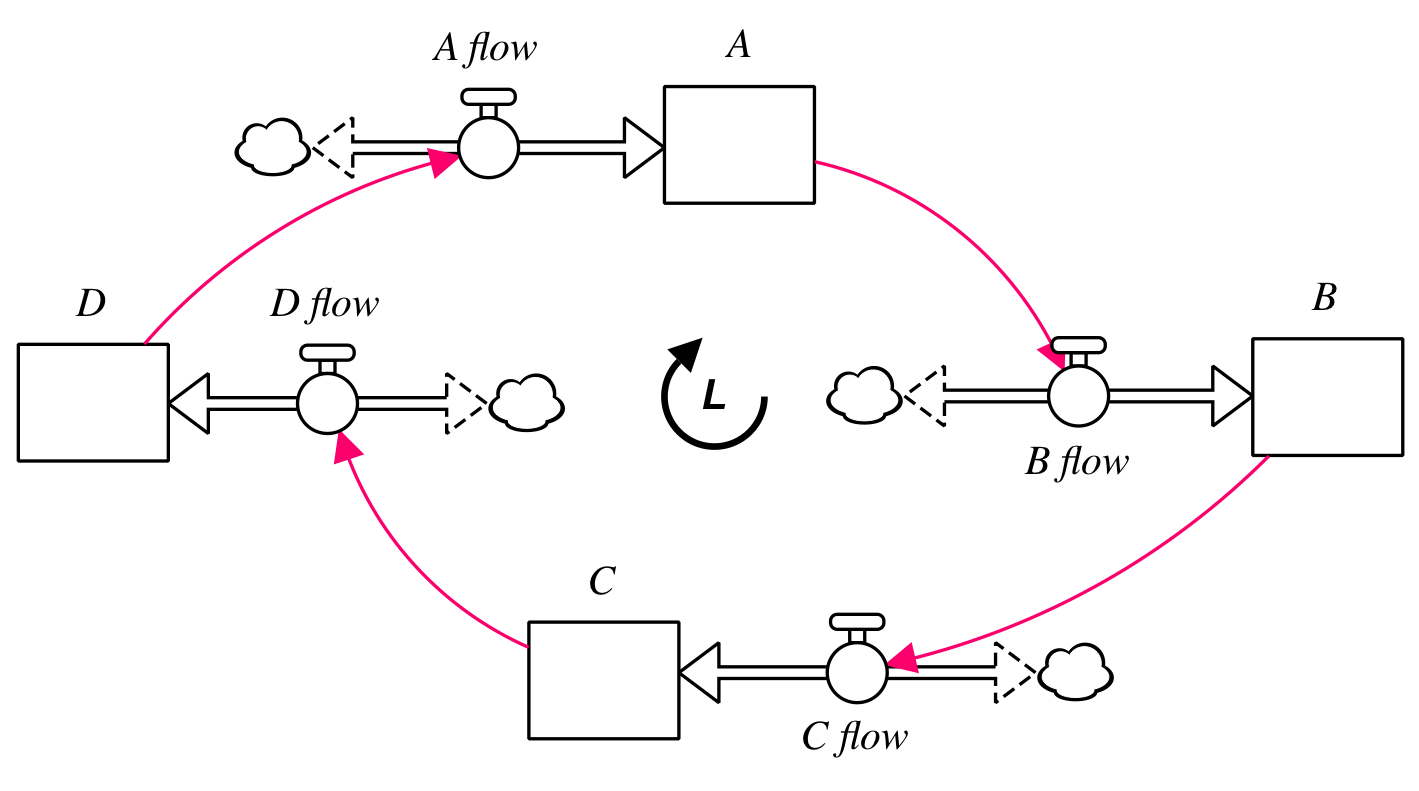
In higher-order loops, the source and target stocks of each link are different. There is an impact associated with each stock to stock link. For example, in figure 4 the impact of loop L on stock B is the impact of A on B. There will be a separate impact of the loop on stock C, i.e. the impact of B on C. This loop is fourth-order because it has four stocks. Thus, it takes four impacts to quantify the loop.
The product of all the loop impacts in a feedback loop equals the loop gain, regardless of the complexity of the system dynamics model.
The causal connection between stocks can be interpreted as a force in the Newtonian sense. Impact is then the ratio of the force to the momentum of the stock. See the Newtonian framework.
For further information see:
- Introduction to Loop Impact
- Hayward J. & Boswell G.P. (2014). Model Behaviour and the Concept of Loop Impact: A Practical Method. System Dynamics Review, 30(1), 29-57.